Riku Murai
I'm a PostDoc at Imperial College London, working on distributed many-device optimisation, low-power
unconventional sensing, and 3D scene representation for SLAM.
Before that, I was a PhD student jointly supervised by Prof. Paul H. J. Kelly and Prof. Andrew J. Davison, and during my PhD, I was a research scientist intern at Meta, Embodied AI team within FAIR.
Before that, I was a PhD student jointly supervised by Prof. Paul H. J. Kelly and Prof. Andrew J. Davison, and during my PhD, I was a research scientist intern at Meta, Embodied AI team within FAIR.
Publications
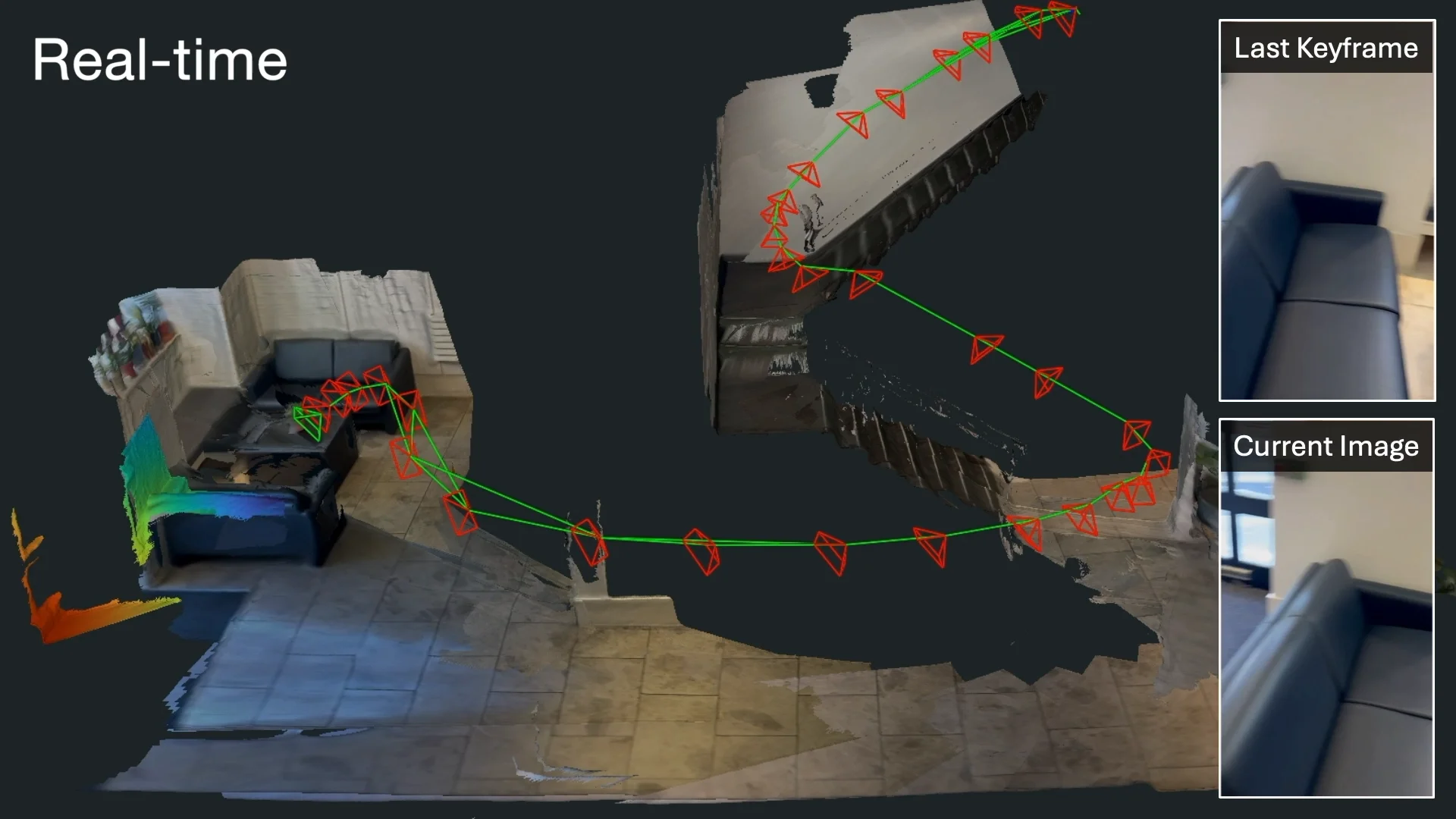
MASt3R-SLAM: Real-Time Dense SLAM with 3D Reconstruction Priors
Conference on Computer Vision and Pattern Recognition (CVPR), 2025
Riku Murai*,
Eric Dexheimer*,
Andrew J. Davison
(*equal contribution)

SAFER-Splat: Safety with Control Barrier Functions in Online Gaussian Splatting Maps
International Conference on Robotics and Automation (ICRA), 2025
(*equal contribution)
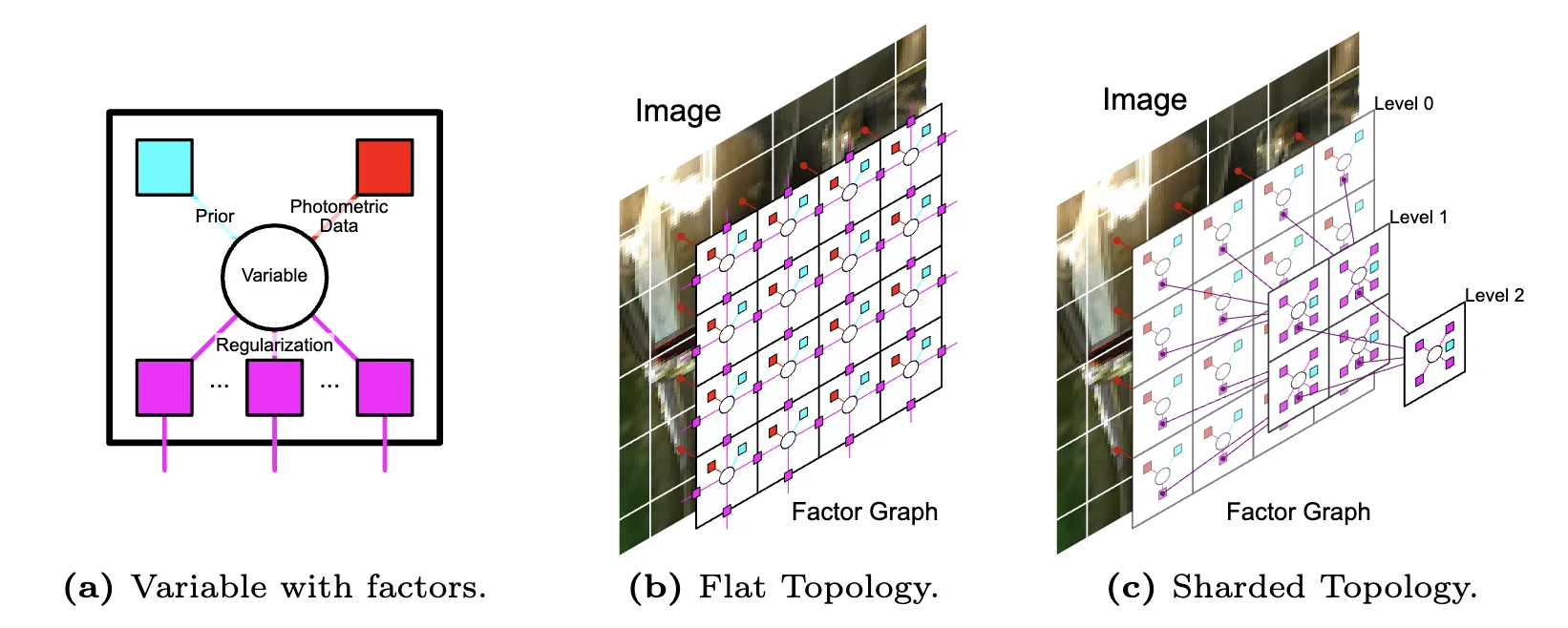
PixRO: Pixel-Distributed Rotational Odometry with Gaussian Belief Propagation
arXiv preprint, 2024
Ignacio Alzugaray,
Riku Murai,
Andrew J. Davison
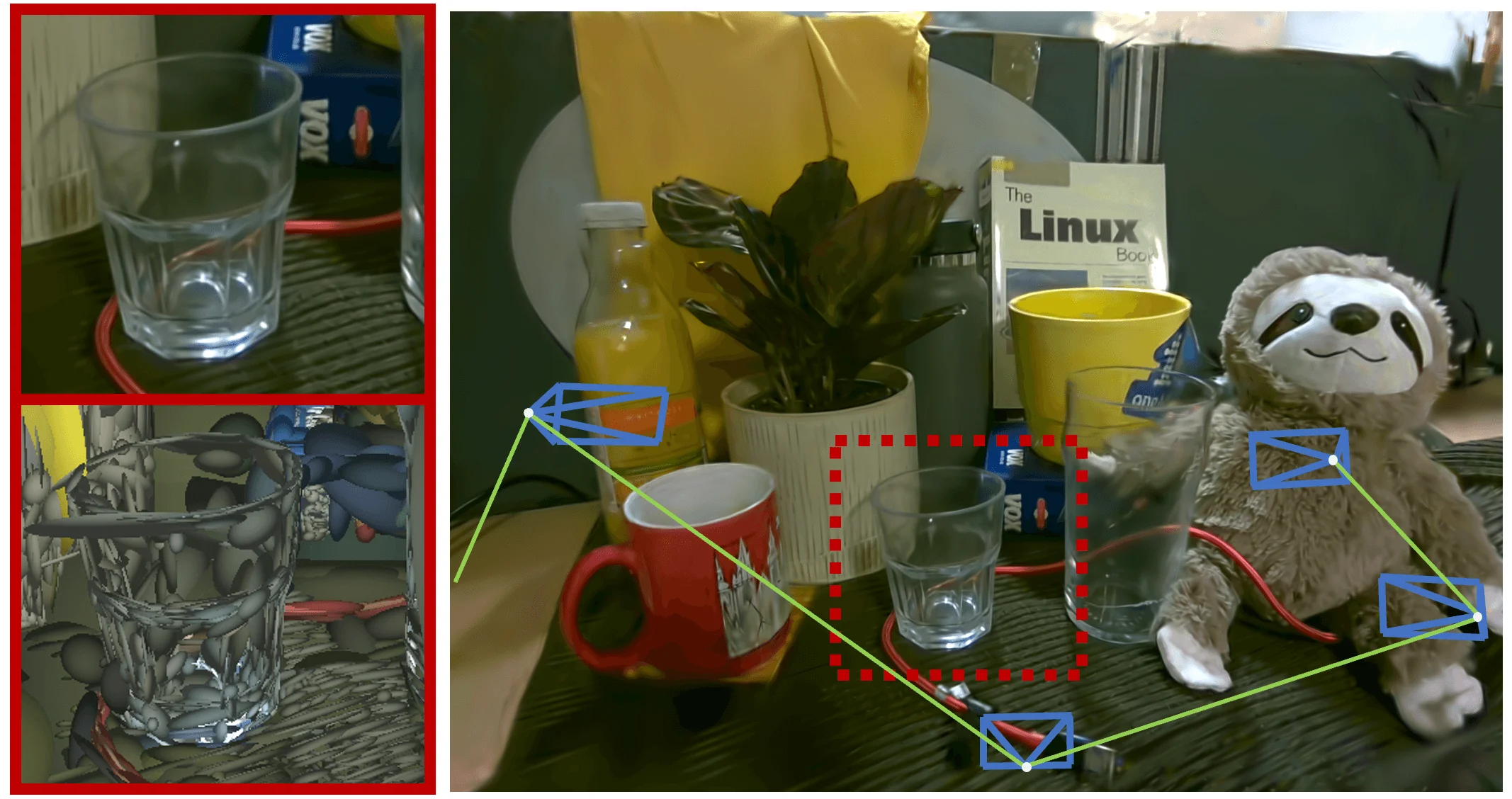
Gaussian Splatting SLAM
(Highlight & Best Demo Award)
Conference on Computer Vision and Pattern Recognition (CVPR), 2024
(*equal contribution)
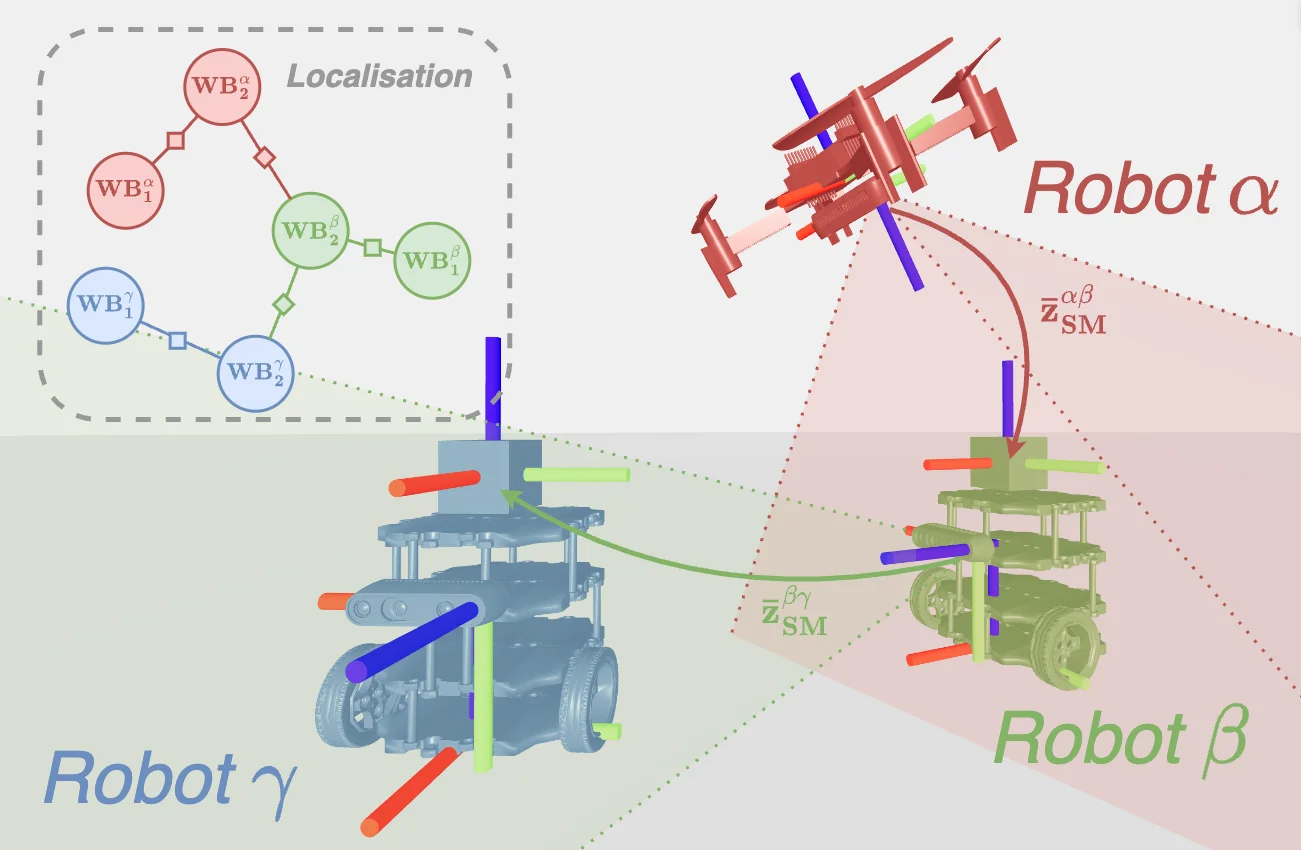
Distributed Simultaneous Localisation and Auto-Calibration using Gaussian Belief Propagation
Robotics and Automation Letters (RA-L), 2024
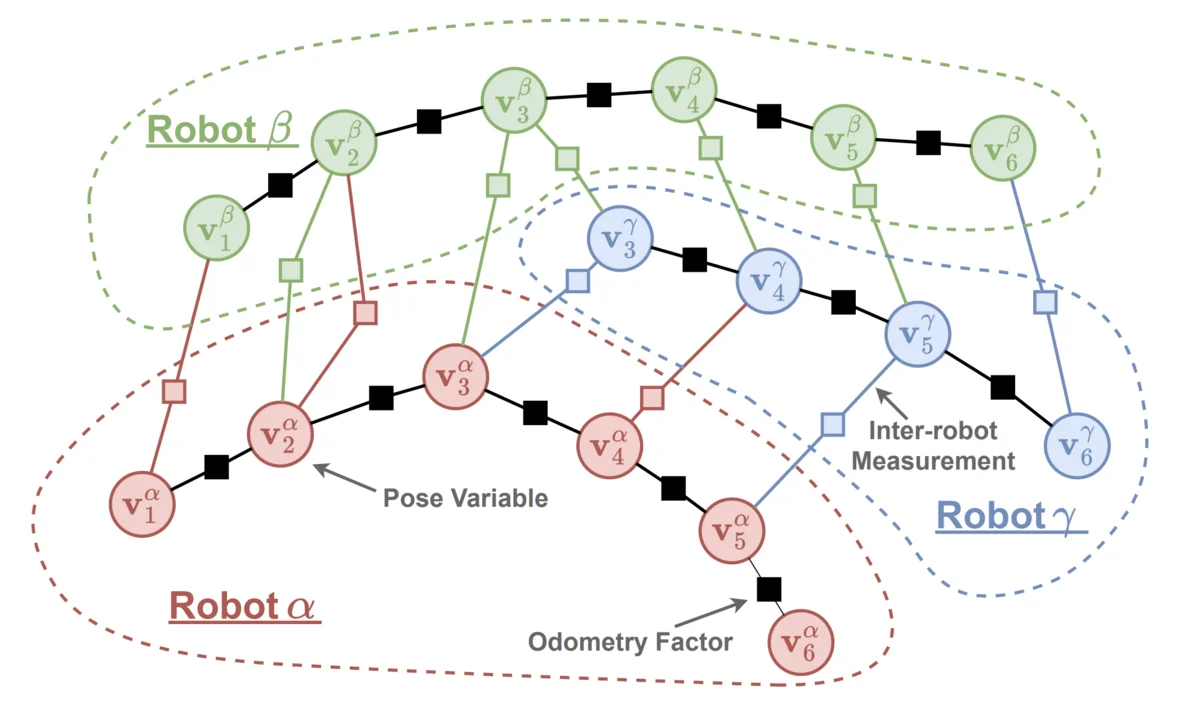
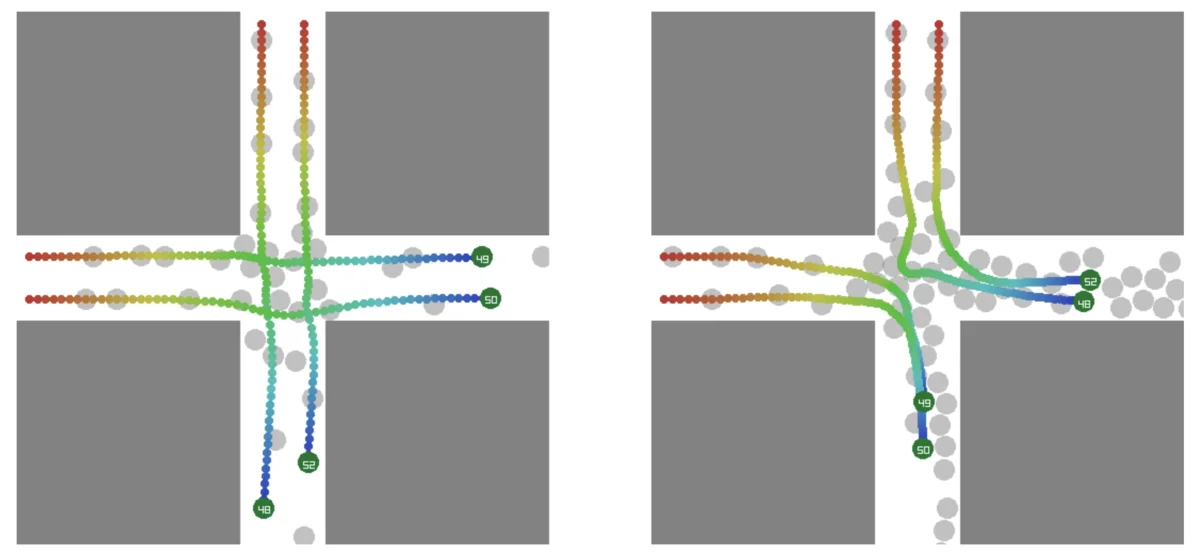
Distributing Collaborative Multi-Robot Planning With Gaussian Belief Propagation
Robotics and Automation Letters (RA-L), 2023
Aalok Patwardhan,
Riku Murai,
Andrew J. Davison
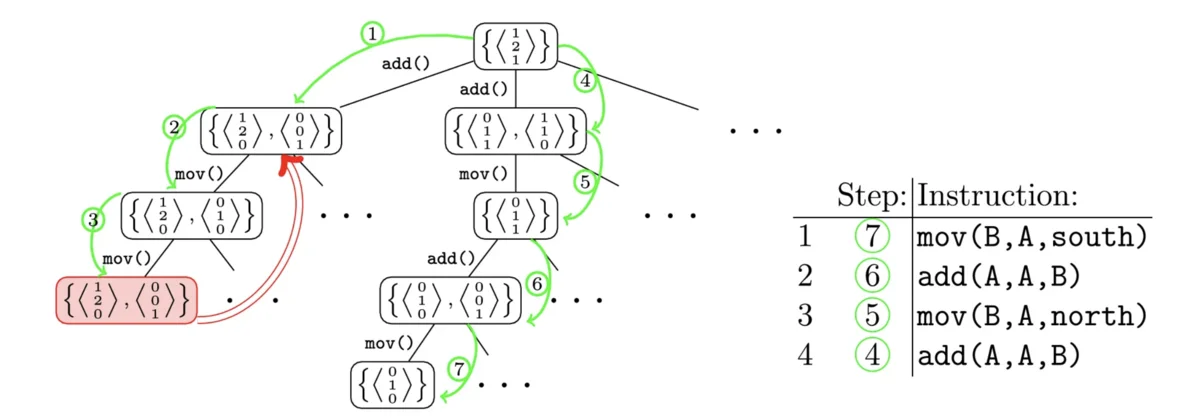
Cain: Automatic Code Generation for A Simultaneous Convolutional Kernels on A Focal-plane Sensor-processors
Languages and Compilers for Parallel Computing, 2022
PathBench: A Benchmarking Platform for Classical and Learned Path Planning Algorithms
(Best Robotics Paper)
Conference on Robot and Vision, 2021
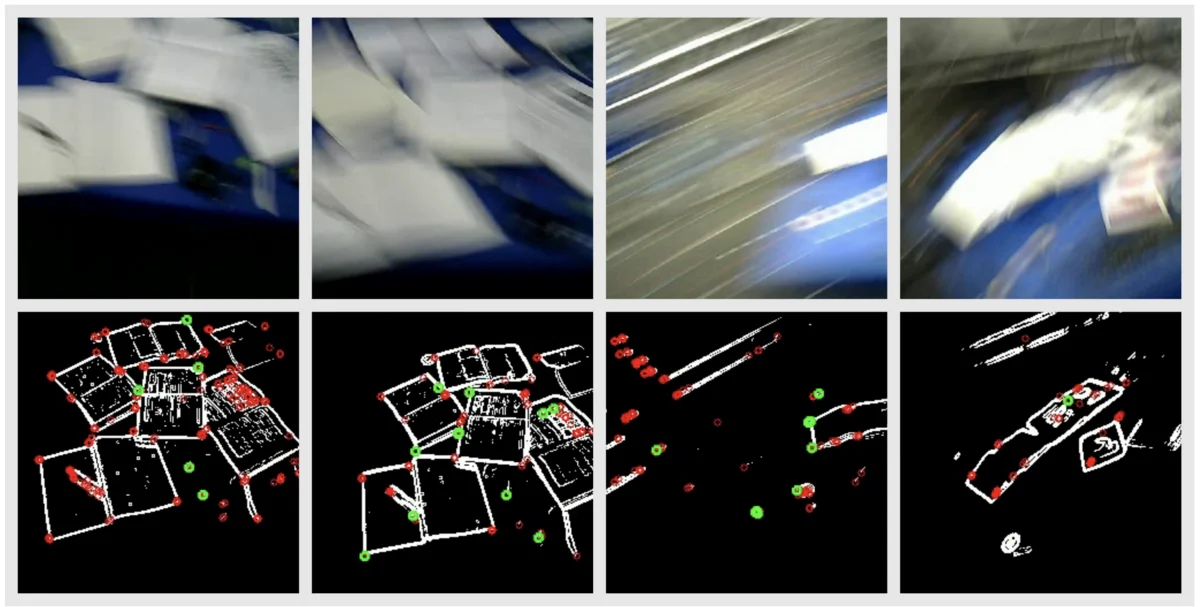
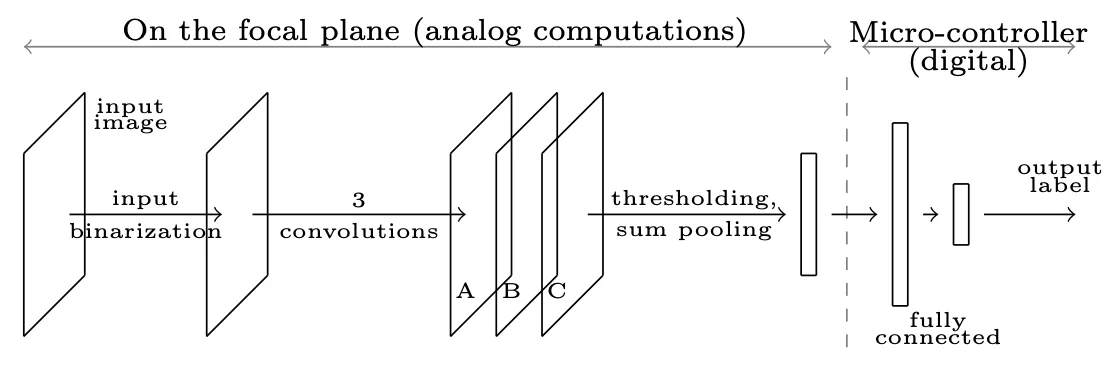
BIT-VO: Visual Odometry at 300 FPS using Binary Features from the Focal Plane
Conference on Intelligent Robots and Systems (IROS), 2020
Riku Murai,
Sajad Saeedi,
Paul H. J. Kelly